Technical Information
100251 & 100253 |
100252 & 100254 |
|
| Opening | 100251: Top 100253: Bottom |
100252: Top 100254: Bottom |
| Voltage | 230V〜/50Hz | 230V〜/50Hz |
| Power Supply | 0.4A | 0.85A |
| Cos Phi (cos ?) | >0.95 | >0.95 |
| Inrush Current (Factor) | x 1.2 | x 1.2 |
| Power | 93W | 190W |
| Torque | 6Nm | 2 x 10Nm |
| Number of Revolutions | 26 1/min | 26 1/min |
| Protection Class | IP 54 | IP 54 |
| Total Length (m.pl) | 319.5 mm | 356.7 mm |
| Diameter | 55 mm | 55 mm |
| Weight | ca. 1.50 kg | ca. 2.20 kg |
| Operating Mode | S2 4 min. | S2 4 min. |
| Operating Temperature & Humidity | Operation: T = -10 ° C … on request / H = max. 90% Storage: T = -15 ° C … + 70 ° C / H = dry, non-condensing |
|
Assembly
Here you will find useful documents for dimensioning and assembling the Venetian blind actuator.
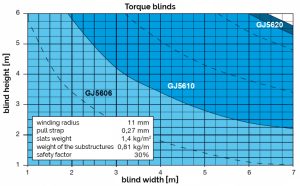
![]() Dimensioning diagram of the drive
Dimensioning diagram of the drive
![]() Installation and start-up instructions
Installation and start-up instructions
COMISSIONING
Initial commissioning
After the power supply is switched on, the device will automatically be in learn mode for 30 minutes.
Re-learn in procedure
Similar to initial learn in, after the power supply is switched on, the device will automatically go into learn mode for after 2 minutes of not connecting to an Airbase. The learn in mode will then be active for 10 minutes.
For full instructions on learning in Loxone Air devices click here.
Once the device has been learnt in, the device will be listed under the I/O tree.
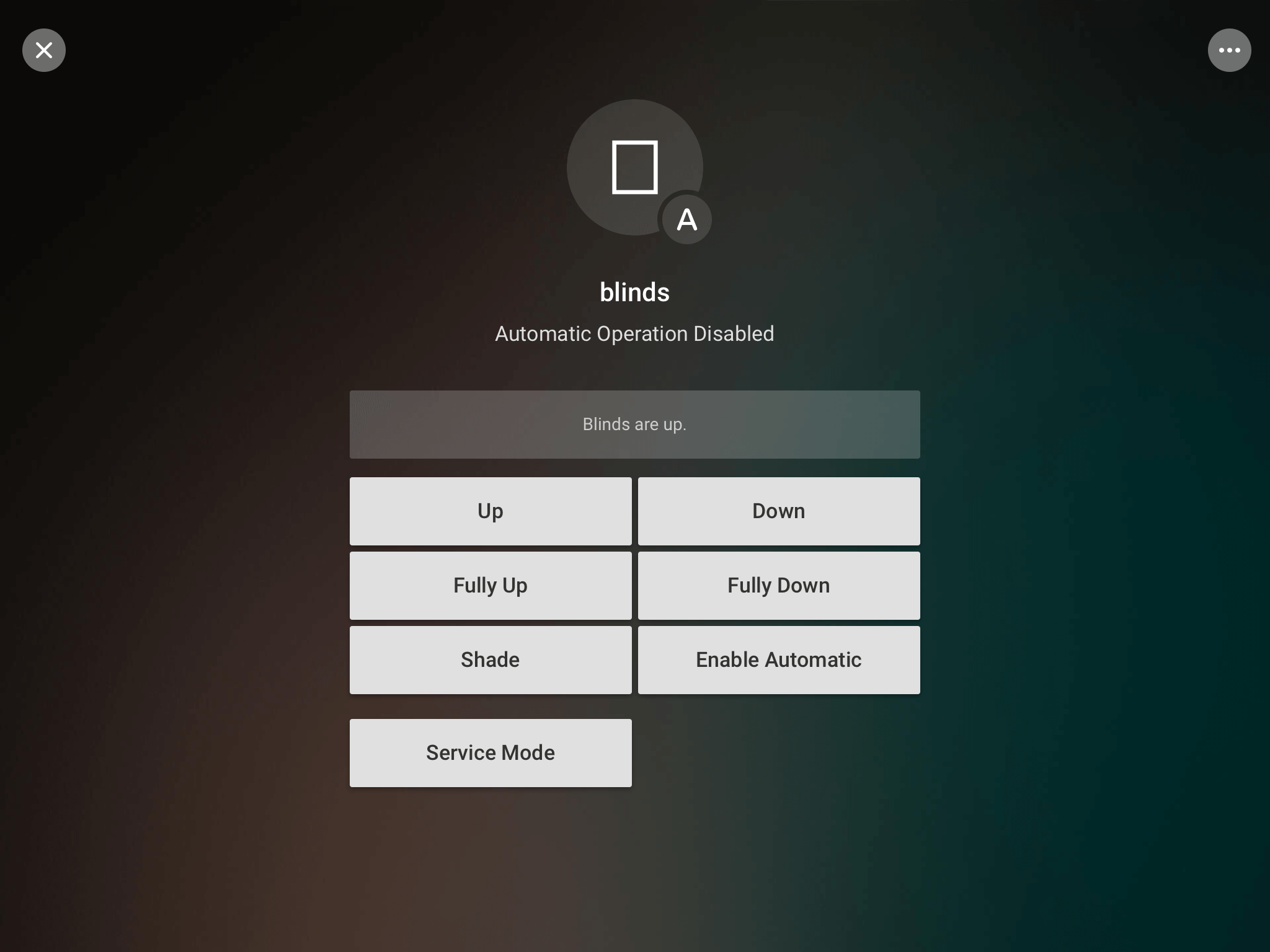
To use the blind drive, simply drag it onto a program page.

![]()
Adjust the end positions
After the motor has been connected and learned into the Airbase, the end positions must now be defined.
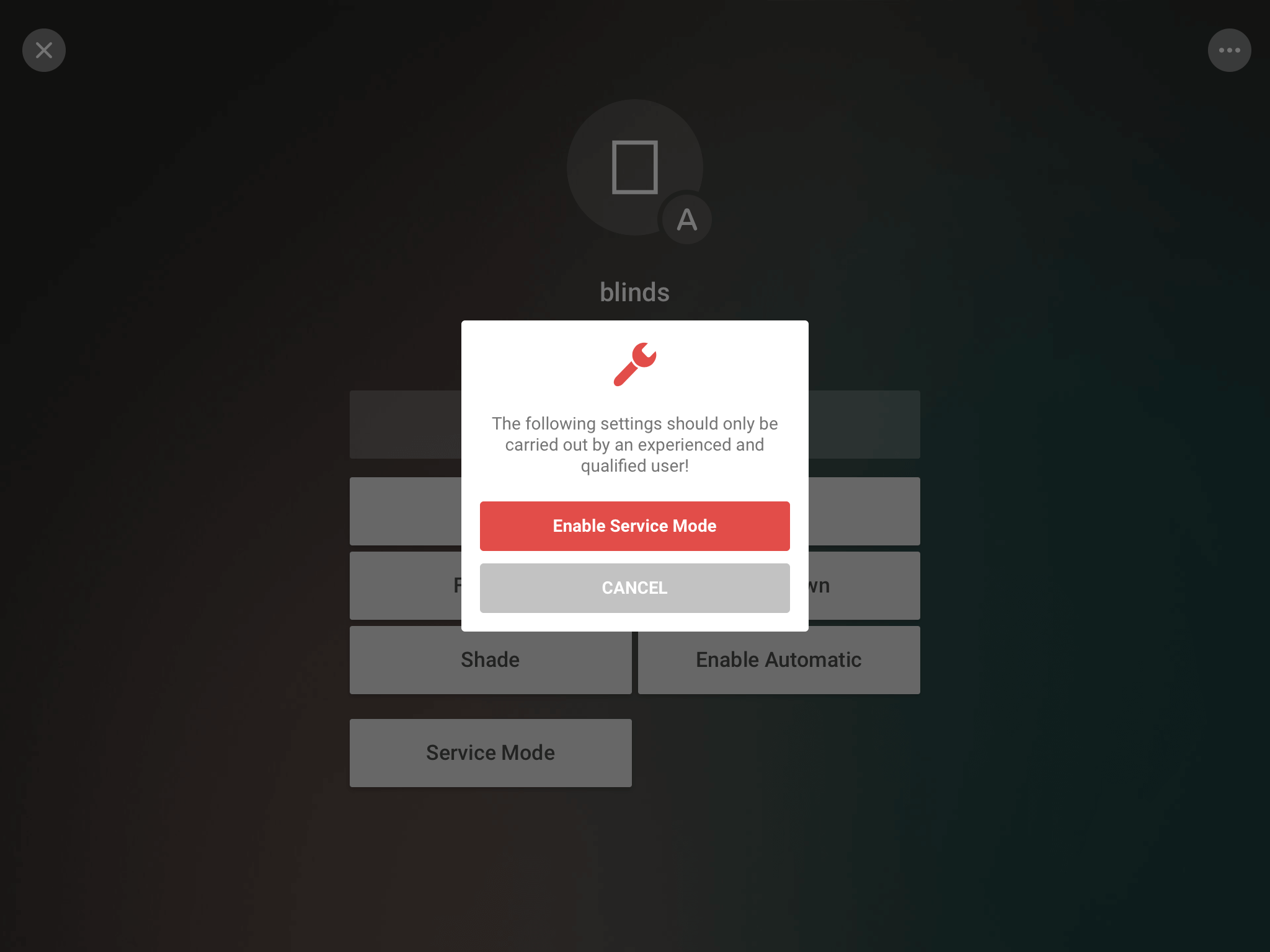
Once the end position has been reached, save it using “End position”.
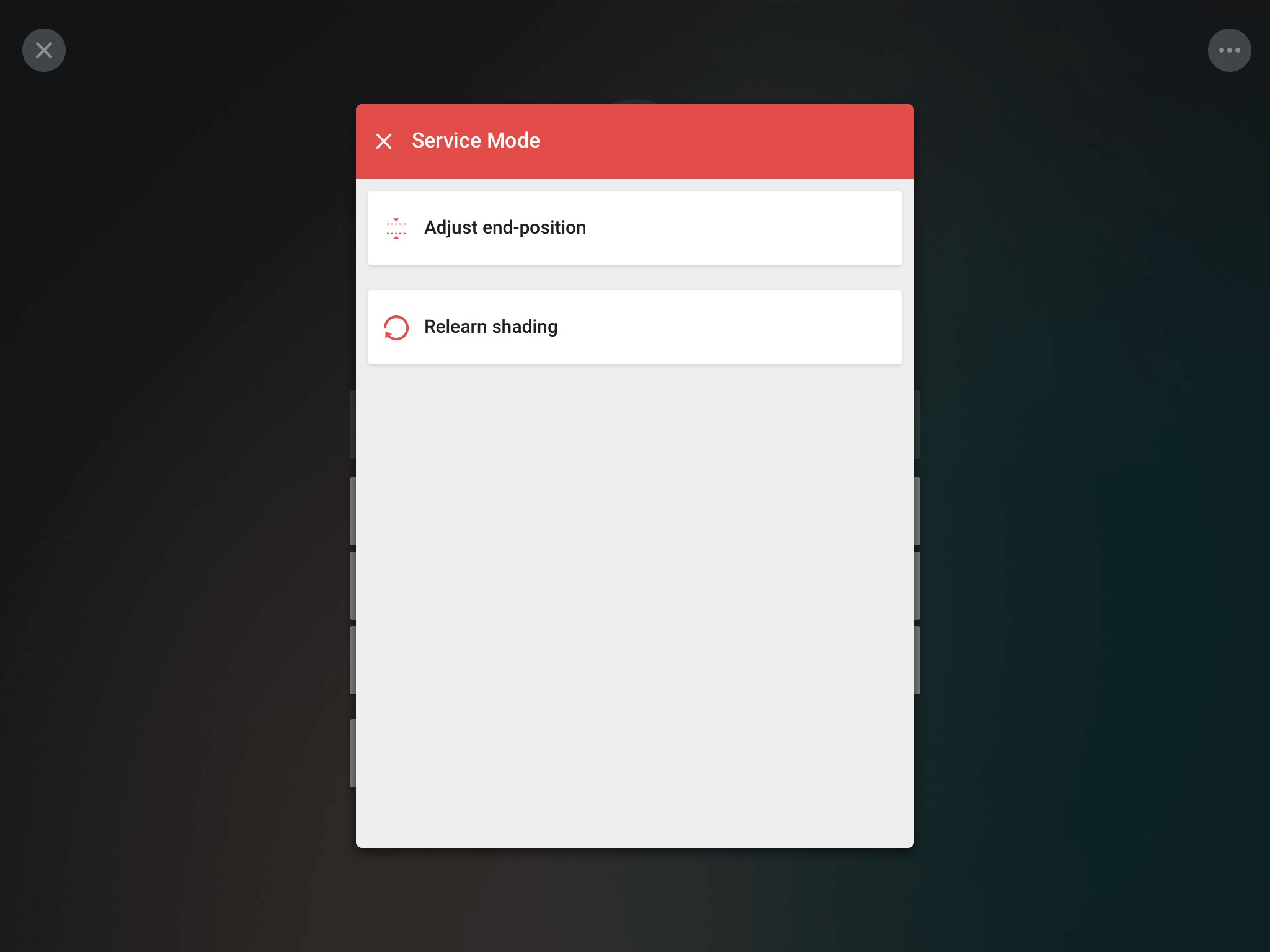
Once the end positions have been learned, the service mode in the app can be closed.
If you want to re-learn the end positions, you can restart the learning process by switching the motor off and after 30 minutes the service mode can be activated again.
![]()
No end positions are set in the delivery state!
Programming in Loxone Config
The programming and actuation of the Venetian Blind Actuator GJ 56 Air is carried out with the Function Block “Automatic Venetian Blind Integrated”.
Just pull across the GJ 56 Air from the periphery tree onto the program page. The motor is now linked directly to the block and you can control the drive without additional outputs.
You can find more information about the automatic shutter programmer here.
The following status outputs of the GJ 56 Air Venetian blind actuator are shown at the “Automatic blind integrated” block.
| Shutter position AQp | Analog output | Target position of the shading area: 0.000 (quite open) to 1.000 (at the bottom) |
| Slat position AQl | Analog output | Slat position of the shading area: 0.000 (horizontal) to 1.000 (vertical) |
| Motor movement Qm | Analog output | On = motor in motion |
| Motor blocked Qb | Analog output | On = Motor blocked |
| Obstacle detected Qo | Analog output | On = obstacle detected |
| Automatic status Qa | Analog output | Indicates the automatic status of the shading |
| Safety shutdown Status Qs | Analog output | Shows whether the safety shutdown is currently active |
| Lock status Ql | Analog output | Output is active as long as St is On |
Slat adjustment travel correction
Loxone practice tip
Preparation

Before you start the correction, attach a piece of wire to one of the slats.
STEP 1:
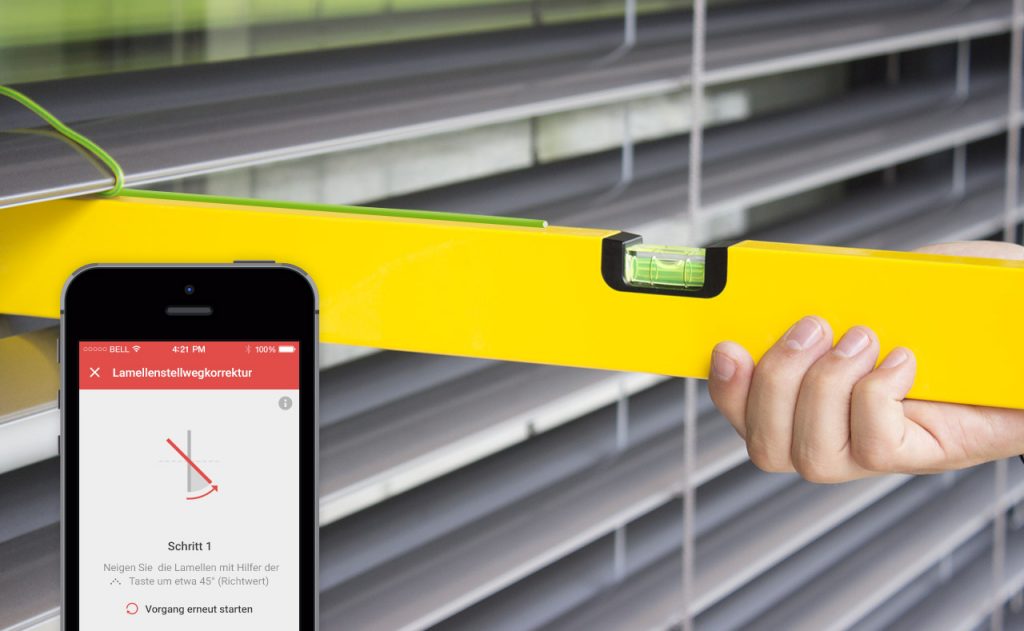
Tilt the slats by approx. 45 ° (guide value). Align the previously attached wire horizontally. If necessary, check with a spirit level whether the wire is also aligned horizontally. Save the slat position.
STEP 2:

In step 2, place the slats in the exact same position as in step 1. The previously attached wire should be brought back into the horizontal position. If the slats are too much inclined, you can start the process again, otherwise save the slat position.
![]() >> General information about Loxone Air technology can be found here <<
>> General information about Loxone Air technology can be found here <<
Original installation and operating instructions together with EC declaration of conformity for the Venetian blind actuator GJ56 Air (pdf)
Download